文/ Kim Boram
蔚山,5月1日(韩联社)——虚拟形象是指在网络游戏和聊天室中代表电脑用户的形象。
然而,“化身”一词在机器人领域有了新的含义。它代表了远程操作机器人(AVATAR)系统的交互式和直观控制界面,旨在将人类实时传送到远程位置。
位于首尔东南约300公里的蔚山国立科学技术研究院(UNIST)实验室中,使用Avatar系统操作的人形机器人“阿凡达”。
它是一种由人类操作员远程控制的机器人,配备了可穿戴接口,包括头戴式显示器、有线手套和靴子。这些设备可以测量人类的声音、姿势、手臂、手和手指的动作,甚至面部表情,并将它们实时传输给机器人。
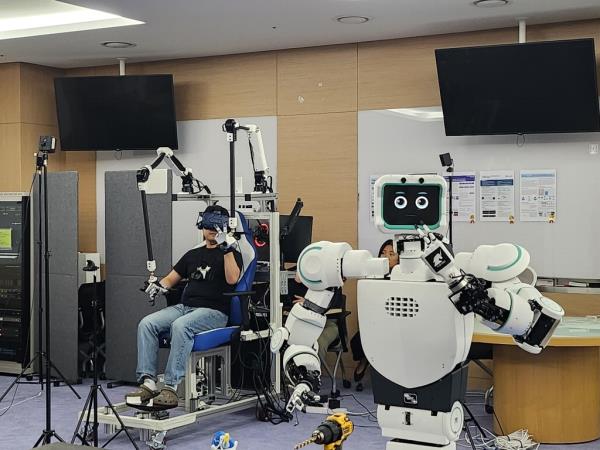
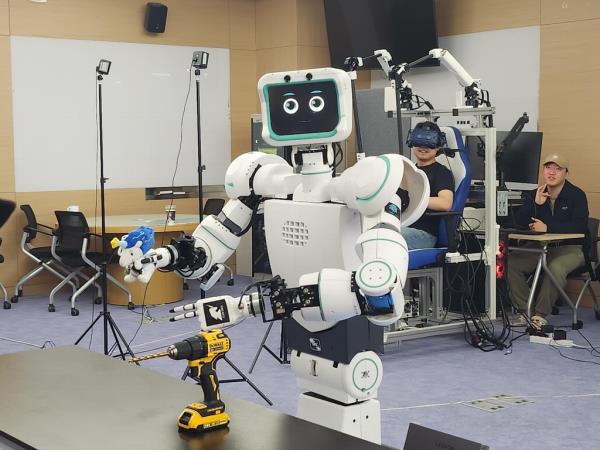
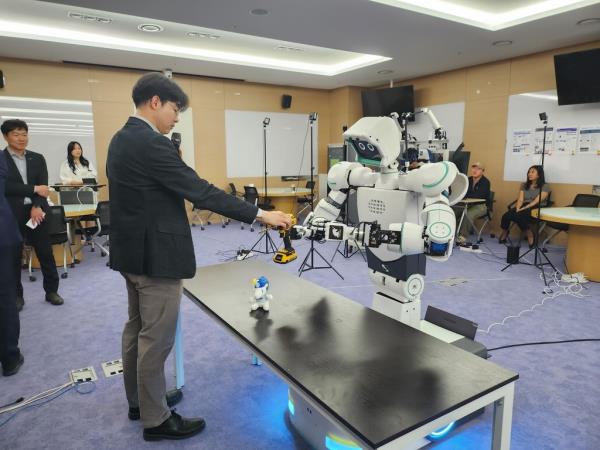
该机器人身高约150厘米,有眼睛和嘴巴的方形屏幕脸,当人类在主座上操作它时,它会对游客说“你好”,并抓取手钻等小物体。
同时,机器人头上的双摄像头为操作者提供视觉信息,而机器人手上的传感器则为操作者的触觉手套的指尖提供振动反馈。
UNIST的“阿凡达”机器人去年在美国加利福尼亚州举行的ANA“阿凡达Xprize”大赛决赛中获得了第六名,这是韩国遥控机器人的最高成绩。
在比赛中,阿凡达完成了复杂的任务,比如拼图、握手、向对手敬酒和拿东西。它还必须绕过一条充满棘手障碍的狭窄小路。
“机器人仍然无法执行复杂的任务。当他们拿着一个物体时,他们必须感受它的重量或质地。在周五举行的新闻发布会上,带领UNIST团队参加Xprize比赛的机械工程系教授裴俊范说:“他们手上需要很多传感器。”
他说:“这副手套充满了各种传感器,可以进行有效的远程操作,感应手指关节和压力的运动。”
这位教授和他的学生创立了创业公司Meligo,将AVATAR机器人系统商业化。他说,远程操作机器人代表了AVATAR技术的巨大潜力,可以帮助解决可能的人类挑战和人为灾难。
他说:“我们一直在研究这个问题,以将其扩展到军事和灾害管理领域。”“我们计划升级这项技术,使用人工智能,使机器人以更精确的方式模仿人类控制器。”
Bae的团队是由韩国国立科学技术研究所(UNIST)资助的研发项目之一。
UNIST鼓励其教授和学生从他们的实验室开始创业,作为其创建一个学院-社区,工业-学院合作网络的长期计划的一部分。最近3周内新成立的52家创业公司,每年将得到27亿韩元的支援。
UNIST校长李容勋表示:“我认为我们有义务为国家和地区做出贡献。”“我们正致力于人工智能、半导体和无碳领域,以满足不断增长的需求。”
brk(结束)

